




Описание
ABB IRB4400 промышленных роботов arm масштабная модель 6DOF робот-манипулятор для преподавания и эксперимент 6-Axis для рабочего стола, роботизированная рука от китайского производителя
Посылка список:
Пункт 1: просто рамка (в комплекте сервоприводы)
Пункт 2: полный комплект (рама, uno r3, платы расширения, 5V4V импульсный источник питания.)

Что может сделать модель робота с шестью осями?
Модель руки робота-это модель пропорции структуры промышленного робота ABB. Он может фактически контролировать движение модели руки робота в соответствии с идеей числового управления. Он подходит для обучения экспериментов, фокусируясь на демонстрации действий, и не имеет фактической несущей способности.
Какой материал руки робота?
Пластина модели манипулятора является ПВХ инженерной пластмассы и изготовлена на станке с ЧПУ. Механическое узкое место роботизированной рукоятки-это крутящий момент сервопривода, пластина манипулятора не была деформирована и сервопривод не имеет мощности. Еще одним преимуществом инженерного пластика ПВХ является то, что пластичность материала очень подходит для Инкрустированного подшипника, и соединение подшипника используется для повышения точности конструкции. Все соединения рычага имеют высококачественные соединения подшипников.
Каковы шесть градусов свободы шестиосевой руки робота и угловой диапазон каждой оси?
Шесть градусов свободы руки робота:
A: обхват талии 0-180 градусов
B: большое и стрелковое оружие взаимодействуют друг с другом, и диапазон угла поворота является переменным.
С: большое и стрелковое оружие взаимодействуют друг с другом. Диапазон угла поворота является переменным.
D: Вращение руки 0-180 градусов
E: запястье 0-180 градусов
F: коготь 0-180 градусов
(0 ~ 180 градусов-это теоретическое значение, фактический угол составляет от 5 до 175 градусов)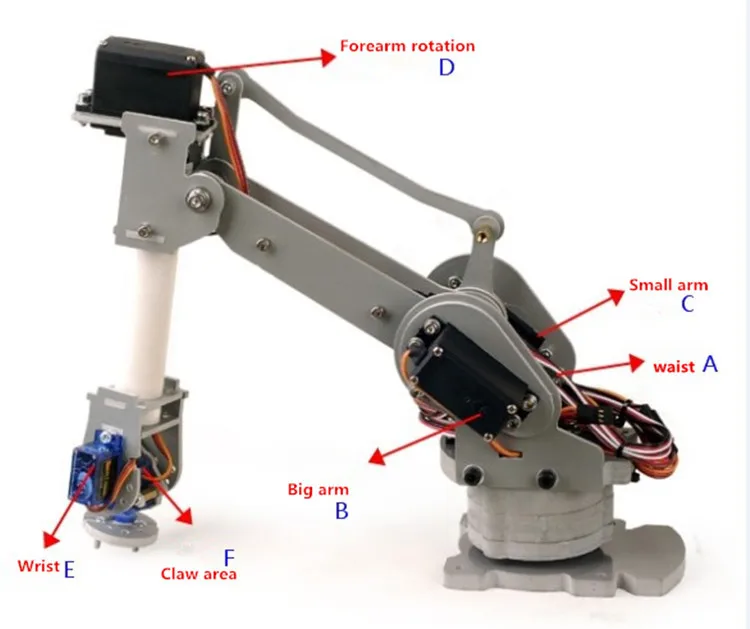
Какова точность руки робота?
Потому что сила модели роботизированного рычага-это рулевая передача, используемая в модельной индустрии, внутренняя передача, используемая в рулевой шестерне-это обычная редукционная шестерня, и зазор шестерни выражен в запястье со свободным ходом около 4 мм, Который подходит для обучения и проверки теорией управления и не подходит для промышленного использования. Производственная линия.
Полный набор шестиосевой механической руки заводского предварительно запрограммированного действия, чтобы сделать тест, рука робота может управляться путем подключения к источнику питания., Нужно делать различные действия можно запрограммировать снова.
Чем отличается шестиосевая стойка от шестиосевой полной комплектации?
Шестиосевая рука робота (в сборе с сервоприводом) * 1
Модифицированная запасная винтовая посылка * 1
-------------------------------------------------- ----------------
Полный набор моделей шестиосевых роботов включает в себя:
Шестиосевая рука робота (в сборе с сервоприводом) * 1
Arduino uno r3 * 1
Плата расширения Arduino * 1
5V4A импульсный источник питания * 1
Модифицированная запасная винтовая посылка * 1
Подключите Программирование питания может работать, завод оснащен роботизированным испытанием действия руки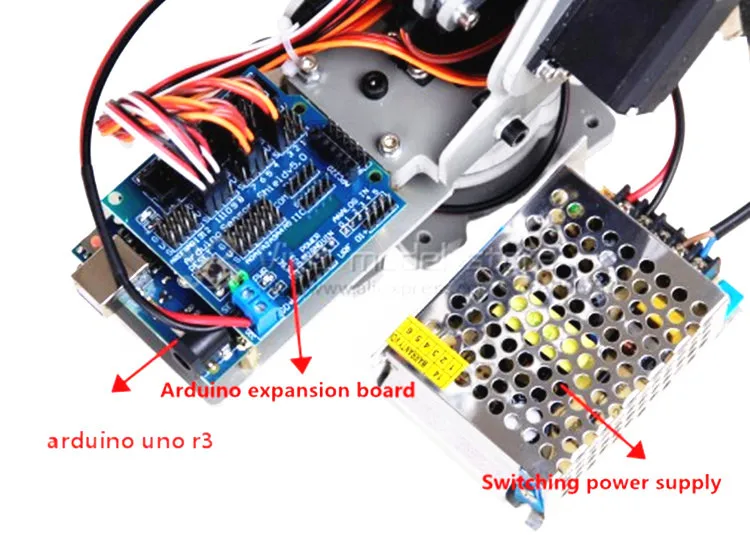
Какой полный набор управления с шестью осями?
Роботизированная рука управляется MCU arduino. В компьютере arduino ide программное обеспечение, роботизированное движение руки отрегулировано на языке C. Через usb-линию загрузки на MCU arduino, MCU arduino может самостоятельно контролировать руку робота, чтобы завершить действие от компьютера. (Предоставьте обучающие материалы arduino и код контрольного образца)




Характеристики
- Тип товара
- Модель
- Пол
- Унисекс
- Тема
- Игрушки со стержнями
- Серийный номер производителя
- Робот
- Степень готовности
- Полуготовый продукт
- Характеристики
- Корпус робота
- Вид анимации
- Китай
- Комплектация
- Части и компоненты для солдата / Набор солдатиков
- Дистанционное управление
- Нет
- Тип куклы
- Модель
- Возрастной диапазон
- > 14 лет
- Размеры
- 195*40*120*99mm
- Предупреждение
- > 14 Years old
- Номер модели
- ABB IRB4400
- Состояние
- Товары в наличии
- Оригинальная упаковка
- Есть
- Бренд
- jongkhurun
- Материал
- glassfiber
- Размер
- 195*40*120*99mm
- Версия
- ABB IRB4400
- Масштаб
- ABB IRB4400
Сопутствующие товары







